« Robots run using Android Linux | Main | Sharceye's first run »
Monday, March 22, 2010
AVC coming soon.... Sharceye Part I
Ooh! The time is flying by, and our 'bot fot the SparkFun 2010 AVC is coming along. Still, it is certainly not ready for prime time yet. Our robot is based on a scooter-type wheelchair, which has been stripped down to its base of rear drive wheels and front steering wheels:
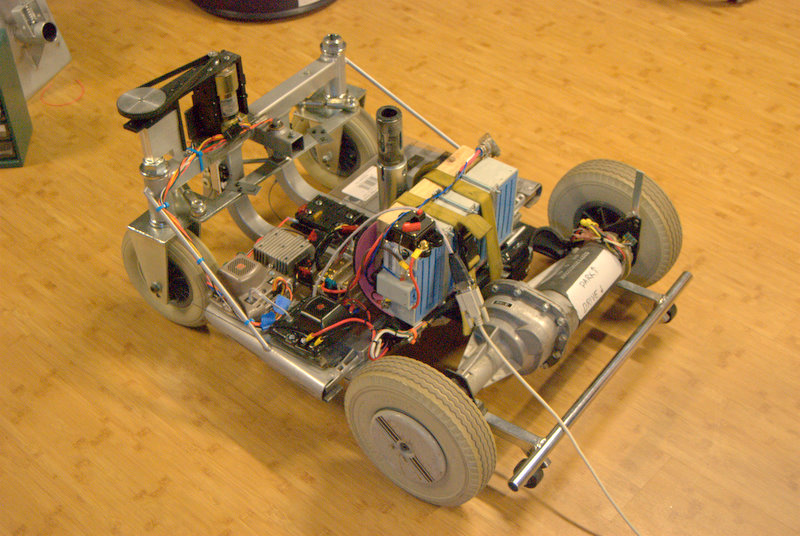
The rear wheels are controlled using a Black Jaguar motor controller, and the steering motor is controlled using a gear motor and quadrature rotary encoder, also driven by a Jaguar motor controller used in position servo mode. The front steering system includes a couple of opto-interrupter type limit switches which actuate at the extreme positions of the steering linkage.
The rear wheel system is powered from a 24V NiMH battery. The front steering system and most of the rest of the system is powered using a 24V to 12VDC buck converter capable of 10 Amp output. This can be seen in the picture as the heatsink looking thing abover and to the right of the beige Jaguar controller. It was originally designed for use in electric scooters that use a 24V motor drive, so that the vehicle running lights and instrumentation can all be used from industry standard 12V components.
As pictured here, the robot does not yet have the computer installed, which is a VIA based EPIA-N Nano-ITX board.