« Maker | Main | Test Posting »
Sunday, July 18, 2010
Club Workshop Robotics Expo & Mini Maker Faire Denver 2010 - Recap
It was fun attending the Club Workshop Robotics Expo & Mini Maker Faire 2010 this past Saturday (July 17). Many fun things to see were there, both robotic and otherwise. I would guess that there was a turnout of approximately 200 people for the day. Kudos and thanks to Steve Garran of Club Workshop and to Steven Gentner of Roborealm for being a driving blast of organizational energy. George Mitsuoka represented Robot Magazine. As well, most of the rest of the gang from SHARC were there. Members of Front Range Robotics also came to show off a few bots. And, of course, many members of the Denver Maker's Group graced us with their presence.

We saw strong local vendor attendance in the robotic area, including Casey Kuhns and the gang from Road Narrows , Landon Cox from ESawdust, Kerwin Lumpkins from Robotic Football League, the guys from Cellbots, and Jim & Louise Gunderson and their jolly clan from Gamma Two Robotics.
Educational robotic groups were also in attendence, with FRC Team 443 Freelance Robotics fundraising by grilling us all yummy burgers and bratwursts. The newly formed BEST Robotics Mile High Hub had a couple of robots to show. Also we had Ross Parrent from Colorado FIRST Lego League bring an FLL arena with last year's challenge for the group to see.
The Denver Mad Scientists had John's Critter Crunch bot running, and Bill's cool PVC air gun powered by an exercise bike powering an air compressor.
Rich Ottosen Had some homebrew RPN calculators on display, and Gary Hayward had a cool LED-based wall mounted fireworks emulation project. Lynne Bruning was there educating the group about eTextiles. John Maushammer had some of his projects on display as well, including his very cool Asteroids Watch.
SHARC had originally planned to have a Trinity College style firefighting robot contest that day. However, we only got one partially working bot on the field. Thanks to Mike Shimnok for bringing his 'bot along to participate! Don from Front Range Robotics provided the playing field, as the one being put together by SHARC is still a work in progress as of this writing.
The Club workshop RepRap build group has been meeting weekly since April this year to try to get one of these machines up and running. I have been participating in this group. We did not have the machine completely debugged yet to the point where it was making parts, but we had it out anyhow to show and talk about.
I had SHARCeye there on display, and an iROBOT create platform with a netbook and Roborealm running Steve G.'s fiducial regonition demo. We had constant traffic for the whole event, with many friendly questions and lots of kids and parents coming by as well, interested in the projects and trying to interest their kids in such things.
On toward the evening, many of us retired to the nearby Breckenridge Brewery for well deserved malty fermentables. It was a fitting end to a very good day.
I apologize if I left anybody out! Pictured: Gamma Two Presenting. Picture credit to George Mitsuoka.
Tuesday, March 30, 2010
Sharceye's first run
Monday, March 22, 2010
AVC coming soon.... Sharceye Part I
Ooh! The time is flying by, and our 'bot fot the SparkFun 2010 AVC is coming along. Still, it is certainly not ready for prime time yet. Our robot is based on a scooter-type wheelchair, which has been stripped down to its base of rear drive wheels and front steering wheels:
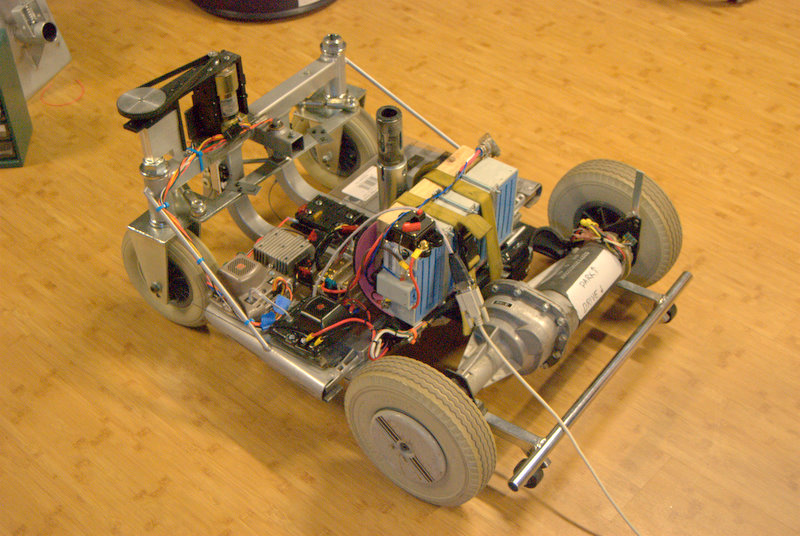
The rear wheels are controlled using a Black Jaguar motor controller, and the steering motor is controlled using a gear motor and quadrature rotary encoder, also driven by a Jaguar motor controller used in position servo mode. The front steering system includes a couple of opto-interrupter type limit switches which actuate at the extreme positions of the steering linkage.
The rear wheel system is powered from a 24V NiMH battery. The front steering system and most of the rest of the system is powered using a 24V to 12VDC buck converter capable of 10 Amp output. This can be seen in the picture as the heatsink looking thing abover and to the right of the beige Jaguar controller. It was originally designed for use in electric scooters that use a 24V motor drive, so that the vehicle running lights and instrumentation can all be used from industry standard 12V components.
As pictured here, the robot does not yet have the computer installed, which is a VIA based EPIA-N Nano-ITX board.